予見制御のロボット・電力システムへの応用
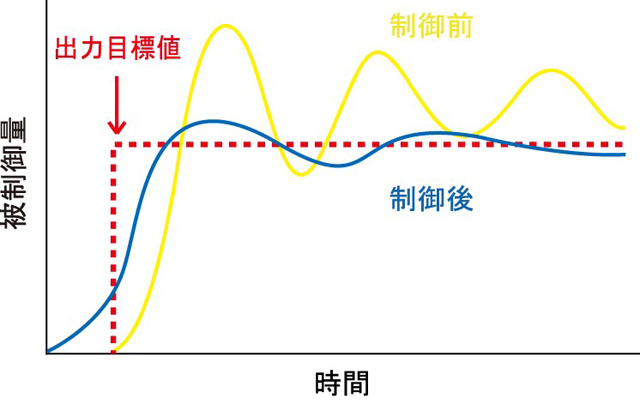
図1: 予見制御の効果
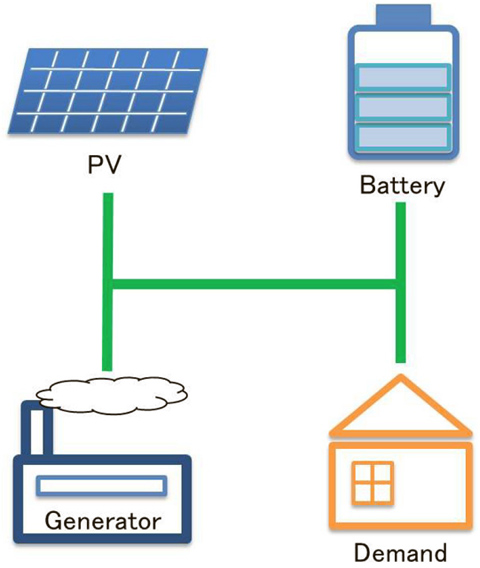
図2: 太陽光発電導入時の電力系統
予見制御の設計法を開発し, それをロボットの軌道制御と電力系統の需給制御へと応用しています。 予見制御とは, 対象物を様々な制約の下で思い通りに動かすために, 予見情報 (将来に関する情報) を利用する制御です。 例えば自動車の運転においては, 前方の道路状況が予見情報となり, これを用いることで効率的な操舵が可能なっています。 これと同様に一般のロボットを制御するときにも, 将来の目標軌道を事前に把握しておくことで, 急峻な環境変化に対処しより滑らかな軌道を実現できると考えられます (図 1)。 また, 電力系統においては, 電力需要に応じた発電機の制御により電力のバランスが保たれており, 近年, 太陽光・風力などの再生可能エネルギー源の導入が進められています (図 2)。 しかし, 太陽光・風力発電の出力は日射量・風速によって逐次変化するため, より需要変動に対して強固な需給制御法の確立が必要とされています。 この課題に対して, 太陽光・風力発電の予測を利用した予見制御を適用することにより, 電力品質を向上させたり, 蓄電池を過不足なく運用できるようになります。
電子・機械類

助教 端倉 弘太郎
- K. Hashikura, R. Hotchi, A. Kojima and T. Masuta: On implementations of H2 preview output feedback law with application to LFC with load demand prediction, International Journal of Control, 2018 (published online).
- K. Hashikura, K. Namba and A. Kojima: Periodic constraint-tightening MPC for switched PV battery operation, IET Control Theory & Applications, Vol. 12, No.15, pp. 2010-2021, 2018.
- K. Hashikura, A. Kojima and Y. Ohta: On construction of an H∞ preview output feedback law, SICE Journal of Control, Measurement, and System Integration, Vol. 6, No. 3, pp. 167-176, 2013.