知能性を持つ自律移動ロボットの研究と社会実装
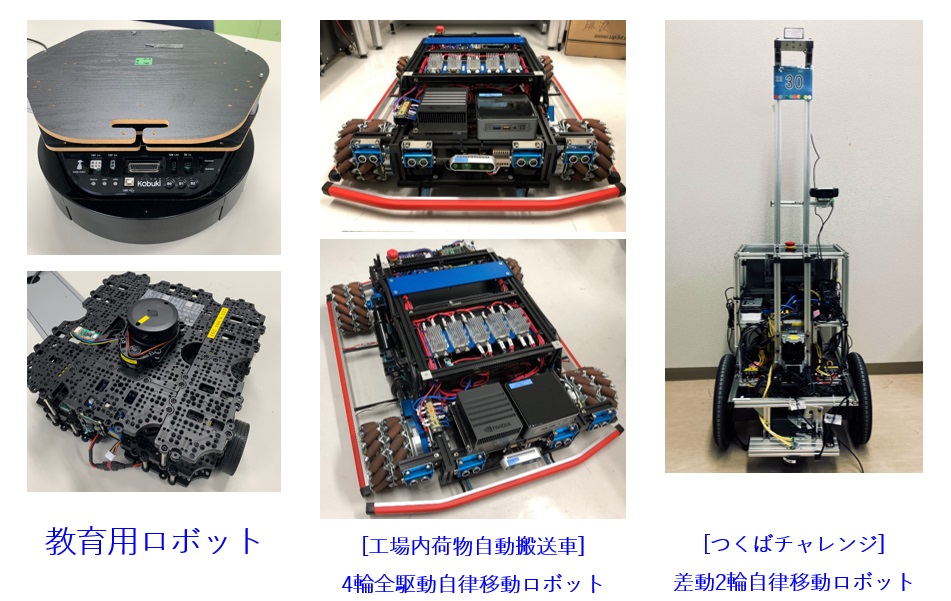
図.1 研究・開発した自律移動型ロボットの様子
私の夢は、分身ロボットを作ることです。このような生活をイメージしてみてください:「私たちは家で仕事すると同時に、ロボットAがコーヒーを作ったり、ロボットBが洗濯をしたり、ロボットCが買い物に行ってくれます。」このようなロボットが実現できると、便利になり、自分の自由な時間を作ることができます。この夢を実現するためには、自由自在に移動できる知能ロボットが必要になります。そこで私は、大学キャンパスの中で自律的に走行できるロボットの要素技術の開発と社会実装を目指しています。(図1)
特徴としては、SDGsを考慮した環境に優しい二次リチウムイオン電源と太陽光発電システムを動力源とし、高性能センシングデバイス、AI推論モデルを駆動するエッジコンピューティングなどの知能性などが挙げられます。また、応用例としては、事務室の職員が機器、書類などを運搬したい場合、従来の手持ちや手押し台車での搬送方式に対し、相手先だけをロボットに指示すると、ロボットがSLAM(Simultaneous Localization and Mapping)技術により周辺の地図を自ら生成・最短経路を算出し、障害物回避アルゴリズムにより目的地に迅速に届けてくれるサービスです。さらに、建物内外を自律移動する能力を活かし、ローカル5Gによる超高速通信技術を用いた工場内外でのオンデマンド搬送、機器の自動点検による予知保全などへの応用展開も検討しています。
電子・機械類

助教 張 浩浩
- Path following for Autonomous Ground Vehicle Using DDPG Algorithm: A Reinforcement Learning Approach. Cao, Y.; Ni, K.; Jiang, X.; Kuroiwa, T.; Zhang, H.; Kawaguchi, T.; Hashimoto, S.; Jiang, W. Appl. Sci. 2023, 13, 6847.
- Application of Model- Based Design to Autonomous Driving for Four Mecanum Wheel AGVs. H. Zhang, K. Motegi, Y. Shiraishi, JTSS, Vol.6, No.1, pp.8-17, 2022.
- Application and Analysis of Random Forest Algorithm for Estimating Lawn Grass Lengths in Robotic Lawn Mower. K. Zushida, H. Zhang, H. Shimamura, K. Motegi, Y. Shiraishi , IJMEA, Vol.9, No.1, pp.6-14, 2021