次世代道路交通システムに向けた制御技術イノベーション
自動運転車両を導入した交通制御システムの枠組み
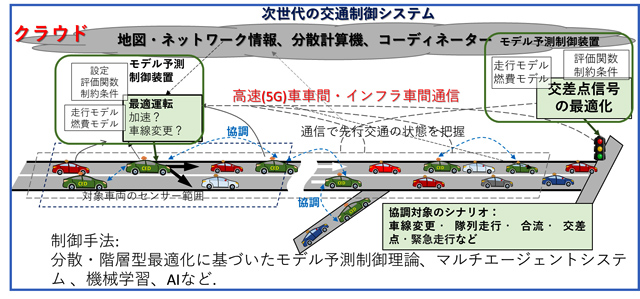
近年、車間通信や自動運転車両の導入により道路交通システムが新しいパラダイムに向けて進化をはじめています。それに伴い、未来の道路交通システムはどう在るべきなのか?事故・渋滞のない安全で効率の良い道路交通システムを実現できるのか?そのためにはどのようなイノベーションが必要なのか?を研究しています。次世代道路交通システムの高度知能化を図るべく、情報通信・クラウド・エレクトロニクス技術を活用した制御技術を開発しています。
代表的な成果として、モデル予測制御に基づいた最適制御による、自動運転車両の省燃費走行や信号機の協調制御技術があります。開発した技術では、環境の変化に合わせた制御系の応答予測に基づいて、運用コストが最小となる交通制御を実施できます。またさらに、大規模なシステムを効率的に運用するための分散・協調型制御手法なども開発しており、ロボット・UAV群(Swarm Robotics)・マルチエージェントサイバーフィジカルシステムのイノベーションに貢献しています。
電子・機械類

准教授 モハマドアブドスサマド カマル
- M.A.S. Kamal, T. Hayakawa, J Imura, Development and Evaluation of an Adaptive
Traffic Signal Control Scheme Under a Mixed-Automated Traffic Scenario.
IEEE Transactions on Intelligent Transportation Systems, 2019. - 大塚敏之, 浜松正典, 永塚満, 川辺武俊, 向井正和,M.A.S.Kamal,西羅光, 山北昌毅,李俊黙, 2015. 実時間最適化による制御の実応用. コロナ社 2015.
- M.A.S. Kamal, T. Hayakawa, J Imura, A. Ohata, and K. Aihara. Smart driving
of a vehicle using model predictive control for improving traffic flow.
IEEE Transactions on Intelligent Transportation Systems, vol. 15(2), pp.878-888, 2014.